本文转载自《中国科技教育》杂志2012.10总第199期
足球运动是一种大家非常喜爱的运动。让机器人去踢足球,听起来像天方夜谭似的。机器人也能去踢足球? 而且,还要组成一个队伍,不同的机器人要互相配合?足球机器人要参加比赛是否有自己的眼睛、自己的双腿、自己的大脑、有自己的嘴?本文试图通过足球机器人比赛的整个准备过程的描述来解答这些问题。
机器人足球比赛是全国中小学生机器人大赛中的一个项目,目前主要有科协机器人足球比赛和电教馆机器人足球比赛。机器人足球作为多种高新技术集成的产物,一方面可为开展诸如多智能体系统协调与合作问题研究提供一个较理想的实验平台,另一方面因其对抗性和博弈性,已成为一种新型、高趣味性、高智力比赛项目。足球机器人处于一个实时性很强的动态环境中,为了出色地完成比赛任务,不仅要求机器人具有良好的动力学特性,还要求机器人具有和人类球员一样的盘球和踢球等能力。在此,我们对如何开展足球机器人活动作一个初步探索。
赛前选拔与前期训练
在足球比赛中参赛队员的自身素质非常重要,主要包括前期准备过程中的动手能力和编程能力以及比赛过程中参赛队员的心理素质和临场应变能力,这些直接决定了比赛能不能取得较好的成绩,因此一定要选好参赛队员。在选择人员时要注意这几个原则。第一,一定要选择对该项目有浓厚兴趣的学生。第二,一定要选择理科成绩特别是数学和物理成绩比较好的学生(机器人准备过程中需要大量编写和更改程序)。第三,一定要是喜欢动手、善于与人协作和沟通并且喜欢计算机学科的学生。在我校是从参加全国中小学生信息学奥赛的学生中选择,因为这些学生有编写程序的基础,在培训过程中他们能够很快地上手,可以很容易地看懂程序并对其进行修改。
如今的机器人编程基本有两种方式,一种是代码实现的编程,一种是图形化的编程。两种语言各有各的特点,前者编程灵活,机器处理速度较后者快,但是编程结构比较复杂,难度比较大,不易于实现;而后者结构简单,一目了然,实现起来比较容易,学生易于上手,但是机器处理速度较慢。因此在对于速度要求不是很高的机器人比赛中,选择图形化编程;在对于速度要求比较高的比赛中,还是应该选择代码编程。本校参加的足球机器人比赛,要求机器人在赛场上的速度和灵敏度都比较高,所以我们选择的是C语言代码编程。
在选择好学生之后,还要对学生进行程序基础知识和机器人基本理论的培训,包括C语言程序的三大基本结构的学习,主要是顺序结构、循环结构、选择语句以及C语言函数的学习和练习。足球机器人程序设计主要运用if选择语句和while循环语句的结合编程,因此在训练过程中一定要让学生重点掌握这两种结构的嵌套。
方式确定与实施策略
确定移动方式
机器人在地面上移动的方式通常有3种:轮式、履带式和步行式。步行移动方式模仿人类或动物的行走机理,用腿脚走路,对环境适应性好,智能程度也相对较高,但不适于在对抗性高的比赛中。履带式实际是一种自己为自己铺路的轮式车辆,适用于松软不平的地面。因此,履带式广泛用在各类建筑机械及军用车辆上,也不适用在比赛中。轮式移动是最常见的一种地面行进方式。它的优点是:能高速稳定地移动,能量利用效率高,机构和控制简单,而且技术比较成熟。在机器人足球比赛中,场地为室内光滑平整地面,非常适合轮式运动。当今有很多机器人生产厂家运用的都是车轮方式。车轮安装方式有2种,3轮机器人车体配置结构虽然简单,但稳定性差,遇到冲撞容易倾倒。与3轮相比,4轮稳定性更好。4轮典型配置有如下2种:
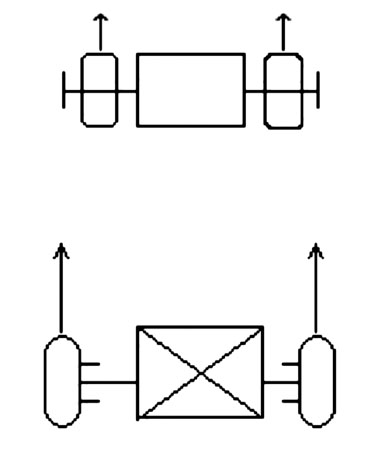
(图1 四轮结构)
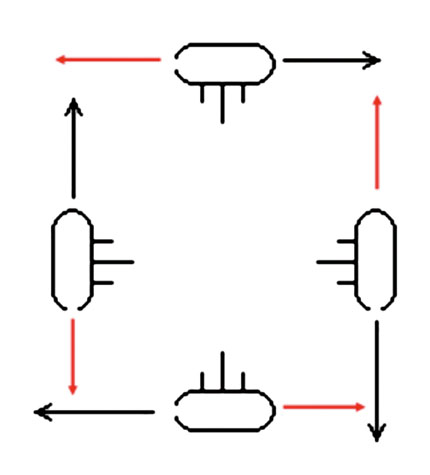
(图2 四轮全向结构)
图1是4轮结构,图2是4轮全向结构。前者在转向时不够灵活,比赛中不容易被对方机器人轻易地推动,适合于电量比较多、电压比较高的比赛中,可用于参加电教馆机器人比赛。而后者则相反,在科协的比赛项目中,由于只用6节干电池,电量比较小,比赛过程中冲撞不会激烈,而且场地是非常光滑的喷绘纸,因此采用四轮全向结构更加灵活些。
选择机器人配件
● 马达的选择
如今市场上主要有两种型号的马达可用于足球机器人,一种是普通马达,有不同输入电压、不同转速的,高电压高转速的适用于电教馆足球,低电压低转速的适用于科协足球。另一种是去年才推出的空心杯马达,要求电压比较低,但是比同样电压的普通马达转速稍高。在科协的比赛中对电压有限制,只能是使用6节干电池,因此选择空心杯的马达有一定的优势。
● 轮子的选择
轮子在这里非常关键,因为比赛场地很光滑,所以轮子不能太过光滑,否则机器人在场地上会很不稳定,可能被对方轻易地推动。所以科协比赛中轮子最好选择软皮且有点纹路的。
● 灰度和驱动板的选择
每个机器人需要4个比较精确的灰度模块,选择的时候一定要在场地上一个个进行测试,使它们在同一个区域的测值比较接近。只有这样机器人才能精确地区分场地的5个区域。选择驱动板时一定要和马达搭配,主要就是输入和输出电压一定要和马达一致,才能达到最佳的效果。
● 主机的确定
主机可以有多种选择,但是一定要遵循一定的原则,即处理速度快、耗电低。就是说要能和驱动板搭配,能在9V电压下正常工作。
● 其他部件的选择
电子罗盘和红外测距一般都是通用的,要求一定要能精确测值。
下期文章将介绍实施策略的第三步——组装调试,以及赛前训练与参赛技巧。■



















